



编程机器人舵机应用
2021-1-14 04:02

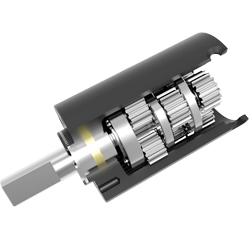
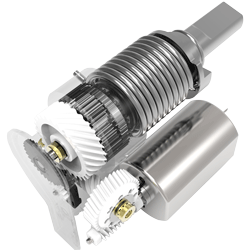
编程机器人常见电机驱动机构
编程机器人驱动机构分为旋转驱动方式和直线驱动方式。由于旋转驱动的旋转 轴强度高、摩擦小、可靠性好等优点,在结构设计中应尽量多采用。但是在行 走机构关节中,完全采用旋转驱动实现关节伸缩有如下缺点: 1)旋转运动虽然也能转化的到直线运动,但在高速运动时,关节伸缩的加速度不 能忽视,它可能产生大噪音; 2)为了提高着地点选择的灵活性,还必须增加直线驱动系统,笨重复杂。



上一篇
没有上一篇了
下一篇
推荐方案

最新动态
相关产品
/ RELATED




在线留言
MESSAGES