



机器人关节应用
2021-5-17 10:55

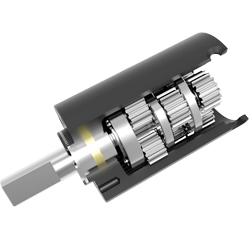
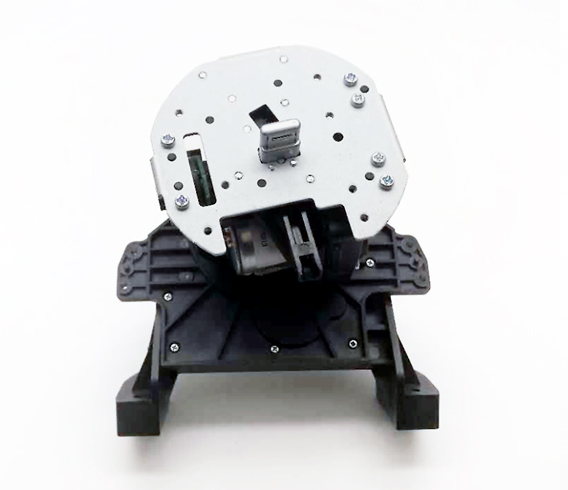
机器人搭配兆威行星齿轮关节电机, 可大大提高机器人的品质和效率。我们的机器人关节齿轮拥有二级、三级、四级传动变化可根据机器人电机的设计需求更换减速比及调整齿轮箱的输入转速及力矩。此外,我们生产的机器人电机齿轮箱具有低电压、低功率、低转速、低噪音、寿命长、微型、高扭矩的特性,更好满足六自由度机器人的传动需求。
威
行
星
齿
轮
关
节
电
机

机器人关节减速机的传动效率和降噪需求,通常需要经过复杂的调试才能实现,为了解决此问题,兆威在进行机器人关节齿轮模具设计时,优化齿轮变位系数和行星齿轮齿干涉校验,预防和改善关节电机的效率、噪音等问题,让机器人关节运动更加灵活。

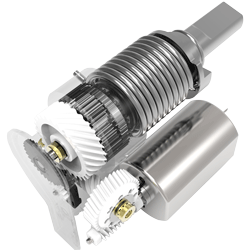
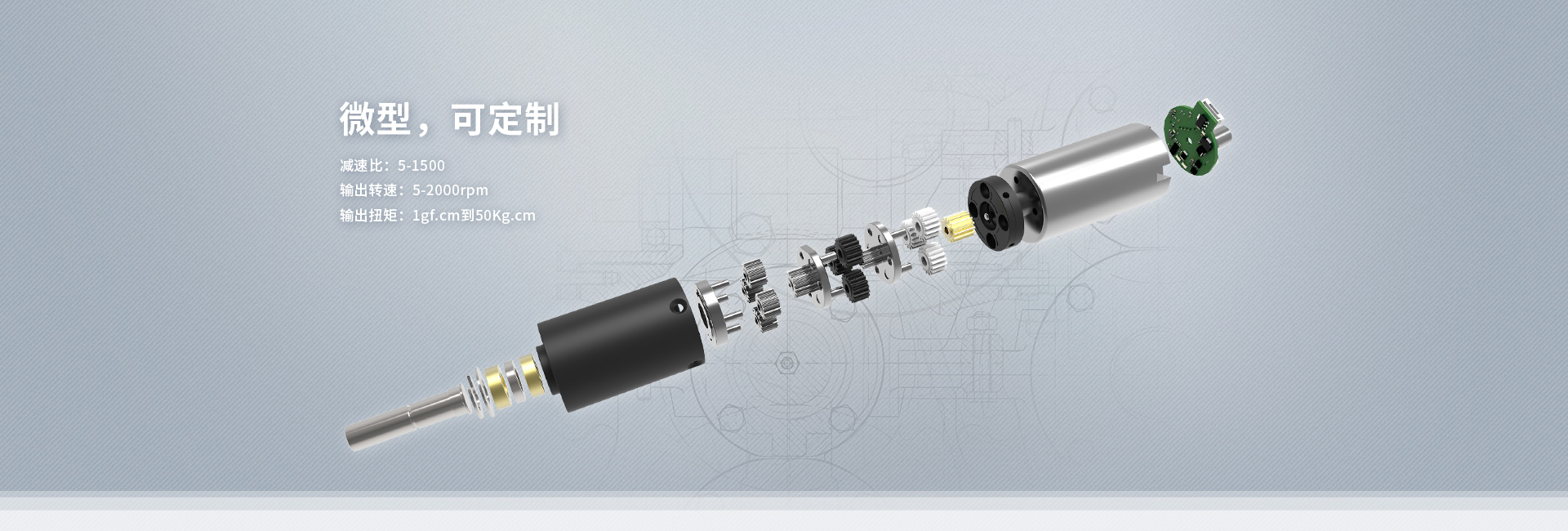
兆威机器人微型关节齿轮箱研发生产,通过发展耐磨材料技术、加工工艺优化技术、润滑技术、装配技术及寿命检测技术以及传动机理的探索,提高了智能机器人感知与识别、机构与传动、控制与交互等方面的性能。 全系列精密机器人用减速电机行星齿轮箱,直径3.4mm-38mm,功率:0.01-40W,输出转速5-2000rpm,减速比5-1500,输出扭矩1gf.cm到50Kg.cm。 机器人关节齿轮箱电压,转速和力矩一般都是根据客户的需求来定的,力矩要求越大,齿轮箱所匹配的电机就越长,减速比也越大,单体马达的转速和功率也是可以调整的,我们可以提供按需定制。
场
趋
势
随着德国提出的“工业4.0”的概念及5G技术开发以来,制造业逐渐由传统的劳动密集型产业向智能化、机械化的技术密集型转变,智能制造大势所趋。 与此同时,当前我国智能制造领域的发展深度和广度日益提升,以新型传感器、智能控制系、工业机器人、自动化成套生产线为代表的智能制造产业体系初步形成。机器人领域的发展趋势更为客观,机器人传动技术的要求也更为精密,兆威可以根据不同客户的需求提供个性化的定制服务。

相关产品
/ RELATED


在线留言
MESSAGES