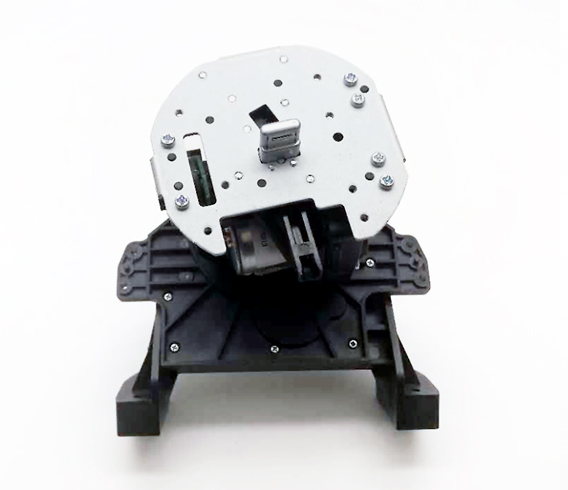


机器人手爪电机产品技术参数与定制开发服务
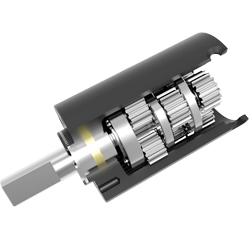
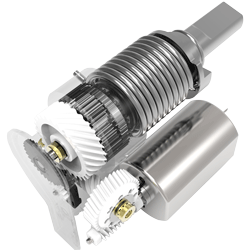
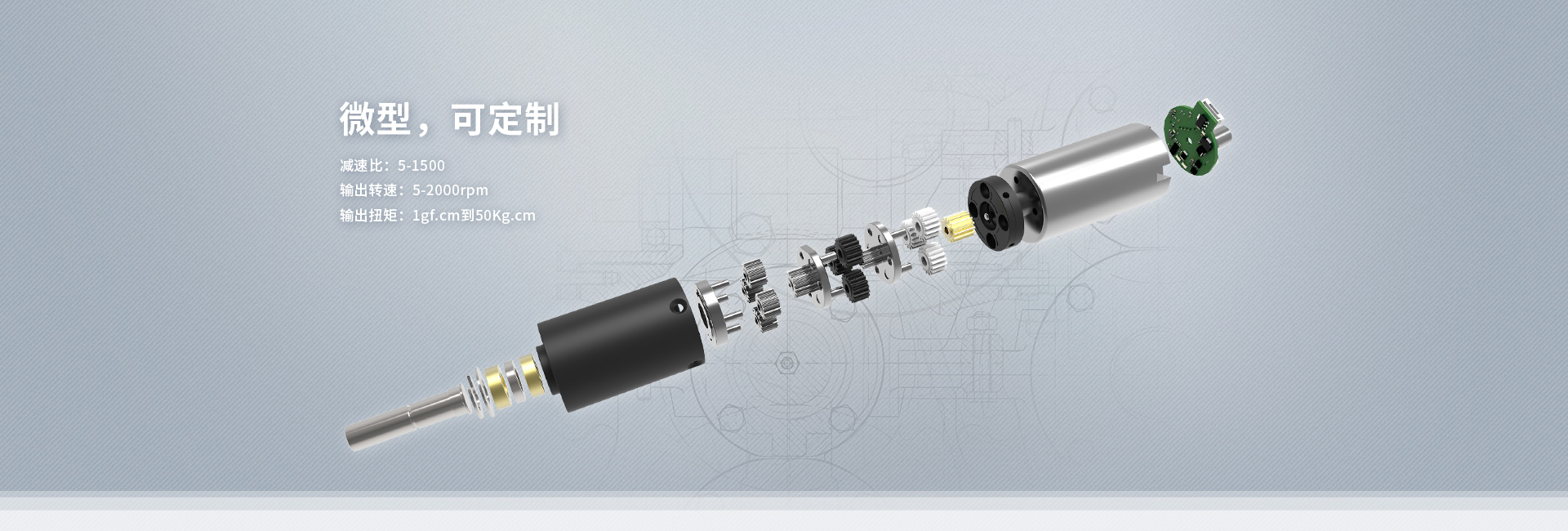
机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是早出现的工业机器人,也是早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。机械手爪主要分为两部分,即手臂和末端执行器。手臂利用关节的运动带动末端执行器的动作,达到预定的位置进行预定的操作。机器人手抓电机是一种小功率微型传动减速电机齿轮箱,主要传动结构由驱动电机(微型电机)、齿轮箱(减速器)组装而成的减速传动设备,运用在机器人手臂、机械手传动齿轮箱电机模块上,简称为“机器人手抓电机”;驱动电机可采用直流电机、有刷电机、无刷电机、伺服电机、步进电机、空心杯电机、微型马达作为驱动器,齿轮箱可采用行星齿轮箱、圆柱齿轮箱、蜗轮蜗杆齿轮箱作为减速器;技术参数通常是定制开发而成,例如输出功率、减速比、输出扭矩、电压、齿轮箱结构、驱动电机类型、传动噪音、传动精度等技术参数是定制开发而成;兆威机电股份有限公司定制机器人手抓电机齿轮箱技术参数范围在直径规格在3.4mm-38mm之间,电压在24V以下,输出功率在50W以下,输出转速5rpm到1500rpm之间,速比范围2-2000之间,输出力矩1gf.cm到50Kgf.cm之间微型传动齿轮箱减速系统。

定制开发服务案例:
项目名称:机器人关节齿轮箱解决方案
项目背景:在沟通快速响应交互中,直流减速电机用于传动机器人的关节,要求有较大功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围。特别是机器人末端执行器(手爪)应采用体积和质量较小,并且能够拥有短时过载能力较大的关节电机。
解决方案:兆威机器人微型关节齿轮箱研发生产,通过发展耐磨材料技术、加工工艺优化技术、润滑技术、装配技术及寿命检测技术以及传动机理的探索,提高了智能机器人感知与识别、机构与传动、控制与交互等方面的性能。 全系列精密机器人用减速电机行星齿轮箱,直径3.4mm-38mm,功率:0.01-40W,输出转速5-2000rpm,减速比5-1500,输出扭矩1gf.cm到50Kgf.cm。