




爬行机器人电机技术参数
2021-7-7 03:34
爬行机器人系统通过安装具有通用性功能的感知设备(也就是传感器,如摄像头,测距仪等等),通过处理,可以对各种场景(术语是非机构化的,也就是说不是特意搭出来的简单实验环境)进行识别;在此基础上,利用认知技术,可以对场景进行理解。
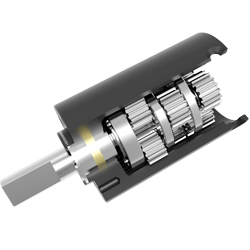
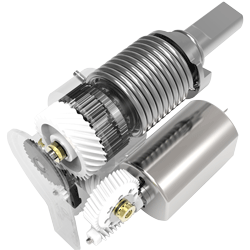
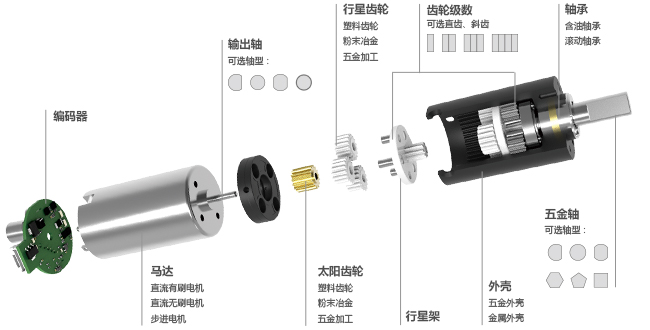
兆威通过对爬行机器人在复杂环境中运动方式进行分析,研发出一种爬行探索机器人的机械结构及其控制齿轮箱系统设计。该设计采用28MM行星齿轮箱实现电动调节;小体积大力矩的传动力矩需求。其中齿轮箱结构拥有二级、三级、四级传动变化可根据注射泵的设计需求更换减速比及调整齿轮箱的输入转速及力矩,以适应复杂工况。转弯部采用柔性机构能够完成6自由度的转弯动;该机器人结构简单,适用于焊弧爬行机器人、检测爬行机器人、清洗爬行机器人、提升爬行机器人、巡线爬行机器人和玩具爬行机器人。
爬行机器人28mm电机技术参数范围:
外径:28mm
材质:五金
旋转方向:cw&ccw
齿轮箱回程差:≤2°(可定制)
轴承:烧结轴承;滚动轴承
轴向窜动:≤0.1mm(烧结轴承);≤0.1mm(滚动轴承)
输出轴径向负载:≤120N(烧结轴承);≤170N(滚动轴承)
输入速度:≤15000rpm
工作温度:-30……+100℃
产品特点:微型、小体积、噪音小、寿命长(可定制)。
爬行机器人电机行星齿轮箱结构:

教育机器人智能底座齿轮箱

机器人关节齿轮箱

儿童智能陪护机器人电机齿轮箱

在线留言 MESSAGES