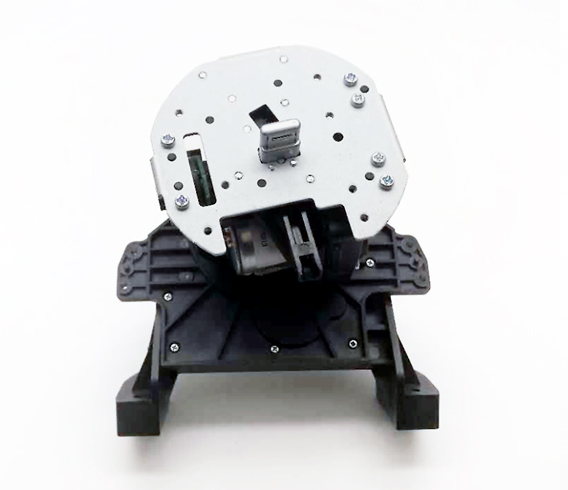


外骨骼机器人电机技术参数与定制
外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术,是指套在人体外面的机器人,也称“可穿戴的机器人”。外骨骼机器人电机驱动系统位于机器运行的末端,负责带动机械结构,执行控制系统传递来的具体任务。根据驱动形式的不同,主要分为三种驱动方式:电机驱动、气压驱动、液压驱动。三种方式各有优劣,其中以电机驱动在实际中应用较为广泛。电机驱动在外骨骼机器人上使用电驱动方式一般有2种方案。一种方案是在旋转关节上直接安装盘式电动机,利用电动机转子的旋转带动关节旋转。这种安装方式结构简单,易于维护拆卸。但是采用这种方案,将使得外骨骼机器人的旋转关节十分笨重,加之安装空间有限,往往会由于电机尺寸限制而达不到到理想的输出驱动力,因此这种方案大多用于实验室原理样机上用以开展相关实验研究。另一种方案就是利用电动推杆驱动,在电动推杆两端用连接耳与外骨骼连接,将电动机的旋转运动转化为推杆的直线运动,推动转动关节转动。电动推杆一般由电动机和丝杠组成,通常采用的是直流电动机,其原理是电动机的转动带动丝杠的螺母转动,然后螺母利用螺旋副的原理推动丝杠做直线运动,从而使丝杠带动外骨骼机器人的大腿、小腿、足部分别绕髋 关节、膝关节和踝关节做旋转运动,实现髋关节、膝关节和踝关节在矢状面内的屈伸运动。兆威公司致力于研发、设计、制造外骨骼机器人电机齿轮箱产品,提供定制开发服务。
定制开发方案:
项目名称:机器人关节齿轮箱解决方案
项目背景:传动机器人的关节,要求有较大功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围。特别是机器人末端执行器(手爪)应采用体积和质量较小,并且能够拥有短时过载能力较大的关节电机。
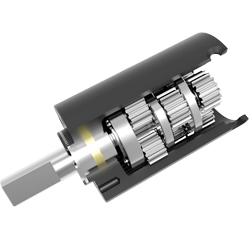
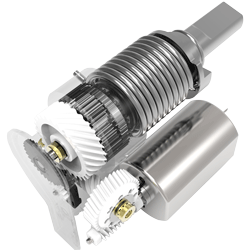
技术方案:机器人搭配兆威行星齿轮关节电机, 可大大提高机器人的品质和效率。我们的机器人关节齿轮拥有二级、三级、四级传动变化可根据机器人电机的设计需求更换减速比及调整齿轮箱的输入转速及力矩。此外,我们生产的机器人电机齿轮箱具有低电压、低功率、低转速、低噪音、寿命长、微型、高扭矩的特性,更好满足六自由度机器人的传动需求。
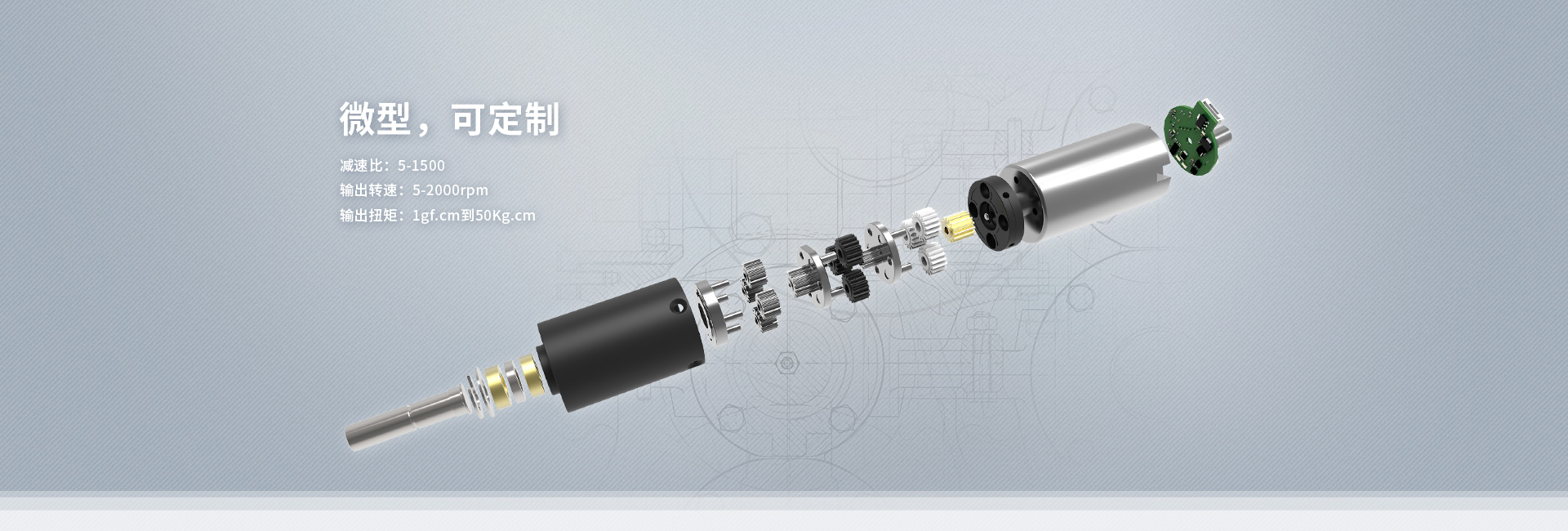
产品齿轮箱定制:直径3.4mm-38mm,功率:0.01-40W,输出转速5-2000rpm,减速比5-1500,输出扭矩1gf.cm到50Kgf.cm。 机器人关节齿轮箱电压,转速和力矩一般都是根据客户的需求来定的,力矩要求越大,齿轮箱所匹配的电机就越长,减速比也越大,单体马达的转速和功率也是可以调整.