

微型行星减速机参数详解
微型行星减速机是一种运用广泛的减速设备,相比较普通减速机、齿轮减速机的传动效率、减速效率、传动精度要高很多;微型行星减速机的常用规格在38mm以下,广泛运用在智能家居、消费电子产品、智能汽车、智慧医疗、5G通讯、智能机器人等领域,不同的运用领域、产品设备采用不同型号、规格、参数的微型行星减速机。
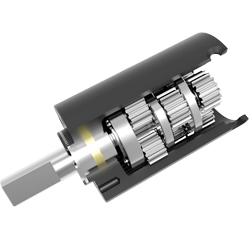
行星齿轮级数:行星齿轮的套数。由于一套行星齿轮无法满足较大的传动比,有时需要2套或者3套来满足用户较大的传动比的要求.由于增加了行星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降。
回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是”分”,就是一度的六十分之一.也有人称之为背隙,这就是传动精度。
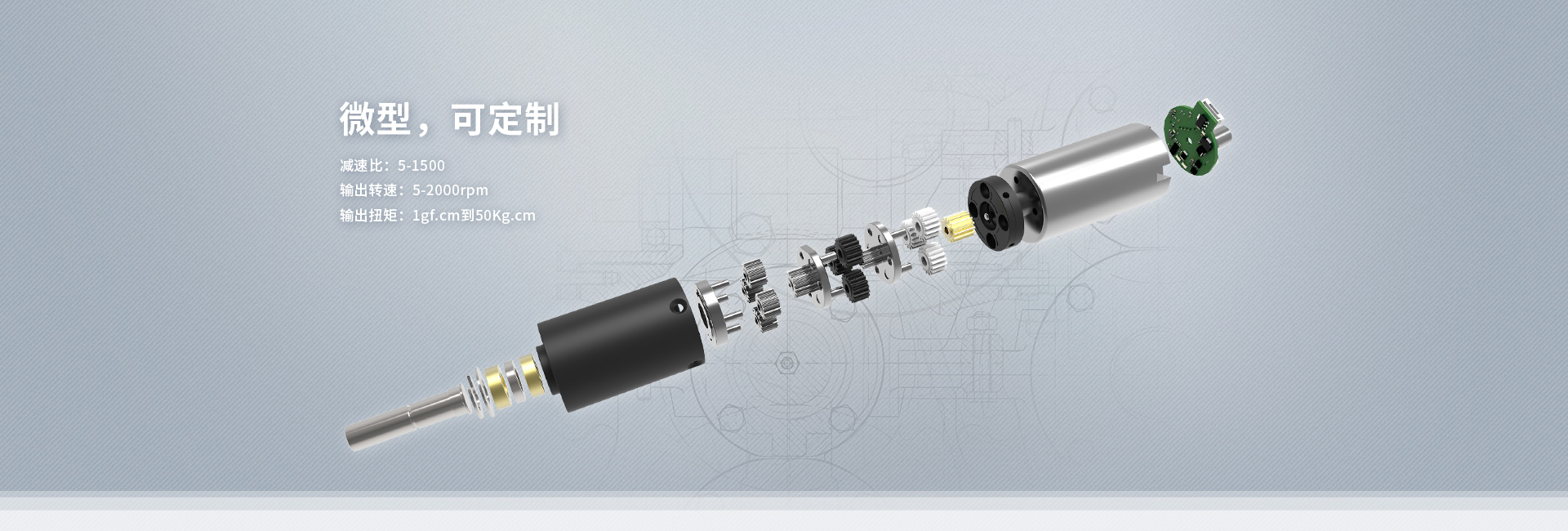
减速比:减速机的传动减速比的表示方法是以1为分母,用“:”连接的输入转速和输出转速的比值,如输入转速为1500r/min,输出转速为25r/min,那么其减速比则为:i=60:1。一般的减速机构减速比标注都是实际减速比,但有些特殊减速机如摆线减速机或者谐波减速机等有时候用舍入法取整,且不要分母,如实际减速比可能为28.13,而标注时一般标注28。减速比计算方法:减速比=输入转速÷输出转速;
输出扭矩:行星减速机由多套行星齿轮系组合而成,行星齿轮系套(级)数越多,减速比越多,输出扭矩越大,反之越小;输出扭矩计算公式:扭矩=9550×电机功率×速比×使用效率/电机输入转数功率(W)=扭矩(nm)*角速度。
传动噪音:齿形误差小、齿面粗糙度小的齿轮,在相同试验条件下,其噪声比普通齿轮要小10dB。齿距误差小的齿轮,在相同试验条件下,其噪声级比普通齿轮要小6~12dB。但如果有齿距误差存在,负载对齿轮噪声的影响将会减少。齿向误差将导致传动功率不是全齿宽传递,接触区转向齿的这端面或那个端面,因局部受力增大轮齿挠曲,导致噪声级提高。