



行星轮式爬楼轮椅的传动方案及运动仿真
爬楼轮椅按照原理划分为几种,包括履带式,行星轮式和腿足式等。主要分析了行星轮式爬楼轮椅的运动过程,指出了当前爬楼轮椅存在的不足,并提出了一种采用同心轴达到不同传动方式的传动方案,可以使轮椅更稳定地实现爬楼运动。使用CATLA软件进行了结构的设计以及运动仿真模拟,验证了设计方案的可行性。
研究人员对爬楼轮椅以及越障机构的研究已经有100多年,也先后提出了很多种方案,常见的有履带式、行星轮式和腿足式。通常,履带式轮椅体积庞大且由于原理上的缺陷,容易造成对楼梯台阶的损坏;腿足式通常也比较复杂,且控制系统繁琐,行星轮式原理简单,容易实现。现在在行星轮式爬楼轮椅方面的研究已经取得了不少的成果。对轨道式机械爬楼装置进行了有益的探索。
智能机器人轮式行走齿轮箱传动原理
协助AGV控制系统的完成(控制系统包括:地面(上位)控 制系统及车载(下位)控制系统),其中,地面控制系统指 AGV系统的固定设备,主要负责任务分配,车辆调度,路 径(线)管理,交通管理,自动充电等功能;车载控制系统 在收到上位系统的指令后,负责AGV的导航计算,导引实 现,车辆行走,装卸操作等功能。
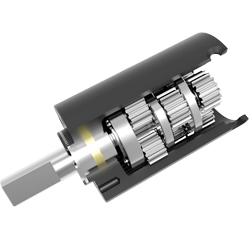
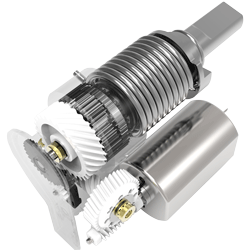
机器人轮式行走驱动部分采用直流电 机和38mm行星齿轮箱组合,反对称安 装方式。这种方式可以在使轮对同轴, 提供较大动力 (通常电机外形尺寸和 功率成一定比例)的情况下,减轻减速 机输出轴受力点,大大缩短轮距,节约 空间,以使机器人体积小型化。
由于采用这种安装方式,电机的选择就 可比较广泛,兆威用38mm金属减速电 机的作用可以提升扭矩,减小转速,也 可以利用之间的摩擦自锁在需要停止 时起到刹车作用,同时延长轴距以满足 轮对安装需要。
舵轮采用电磁刹车,断电抱死,也可手 动释放。
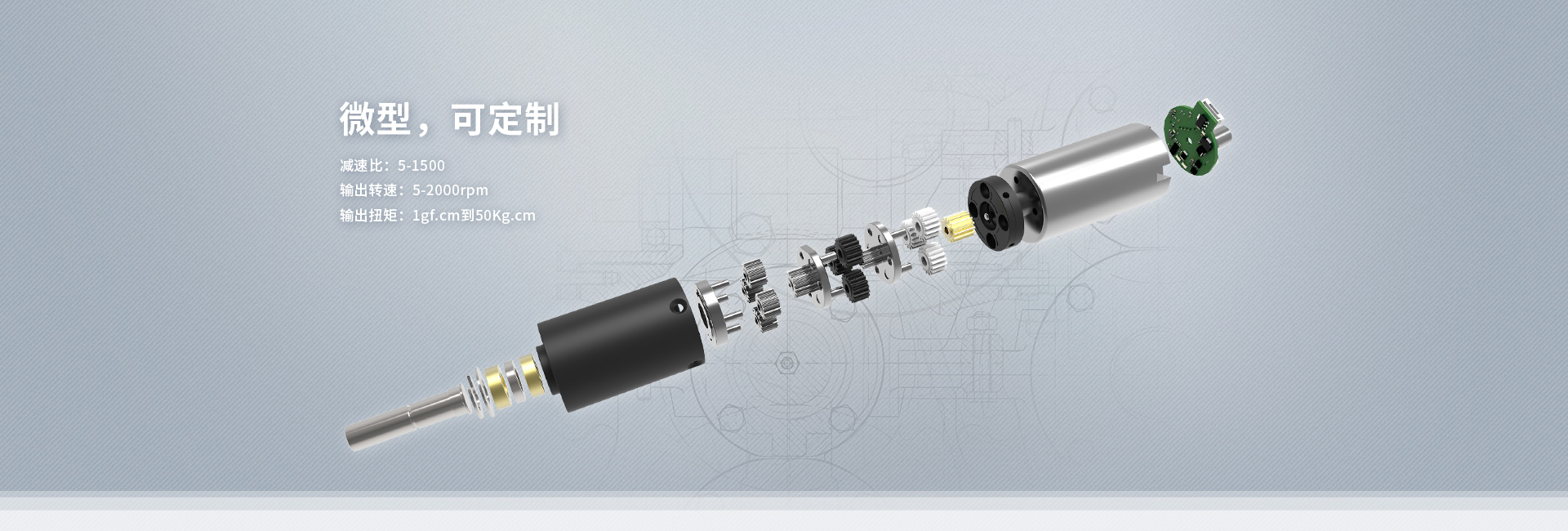
两个驱动电机分别控制左后驱动轮和右后驱动轮,使机器人能够更好的完成转向任务,同时在装置上安装了超 声测距传感器和红外避障传感器,使得机器人在行走时能够发现前方的障碍物,提前转向躲避,解决轮式移动机 器人的拐弯躲避障碍物能力差的问题。基于现场试验和理论分析,爬坡能力差主要是由于驱动系统驱动力不足导致的。而导致驱动力不足的原因多是设计阶段选用的直线导轨摩擦因数太过于理想化,为解决系统负载加大后,其导轨的摩擦因数变化,我们的行星 齿轮箱结构拥有二级、三级、四级传动变化可根据智能机器人的行走驱动马达的设计需求更换减速比及调整齿 轮箱的输入转速及力矩。
