



行星轮系的动态静力分析
2021-5-26 11:36
针对行星轮系动力学建模与动态静力分析问题,提出了相应的向量键合图法。基于平面复和铰的运动约束条件,建立了更加简明的平面复合铰向量键合图模型。根据行星轮系构件间的运动约束关系,将系杆、行星轮、复合铰及齿轮副的向量键合图模型组合起来,建立了双行星轮轮系机构的向量键合图模型。通过有效的增广方法,消除了该类系统向量键合图中的微分因果关系。应用相应的算法,实现了双行星轮轮系机构的计算机辅助建模与动力学分析,说明了所述方法的有效性。
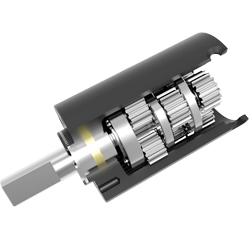
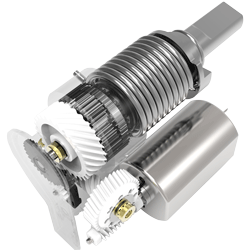
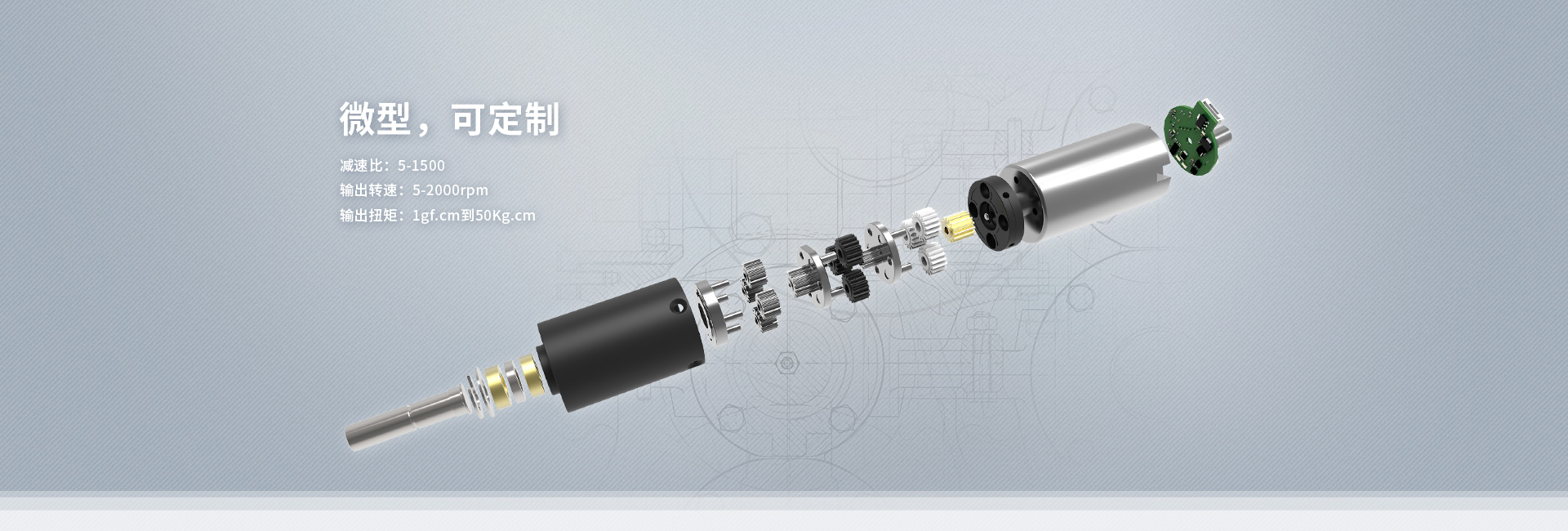
行星轮系机构可用较小空间,实现较大的传动比。具有体积小、质量轻、传动效率、工作平稳及噪声小等特点,被用来代替普通齿轮传动而应用于现代机械中。该类机构的动态静力分析,无论对其传动电机的选用及控制,还是对机构进行动静态强度的计算与校核都十分重要。为此,外学者提出了具有不同特点的力学方法及软件。20世纪50年代末由美国学者所提出的键合图方法就是其中之一,在许多系统的动力学建模与分析中得到了成功的应用。
构成行星轮系的基本构件是太阳轮、行星轮及系杆。其运动特征是太阳轮与行星轮外啮合,行星轮同时绕自身轴线及系杆与太阳轮的共同轴线旋转。由此所形成的构件间非线性约束关系,使其键合图模型中的部分能元件所对应的能量变量是非立的,从而导致非线性微分因果环,给该类系统的计算机辅助建模及动态静力分析带来较大的代数困难。

在线留言
MESSAGES