



移动机器人步进电机参数与定制开发
2021-6-18 02:42
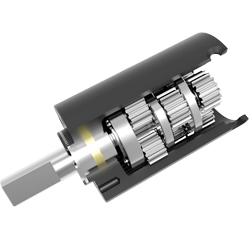
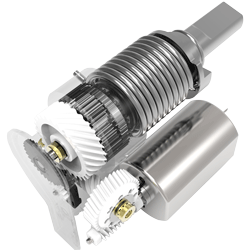
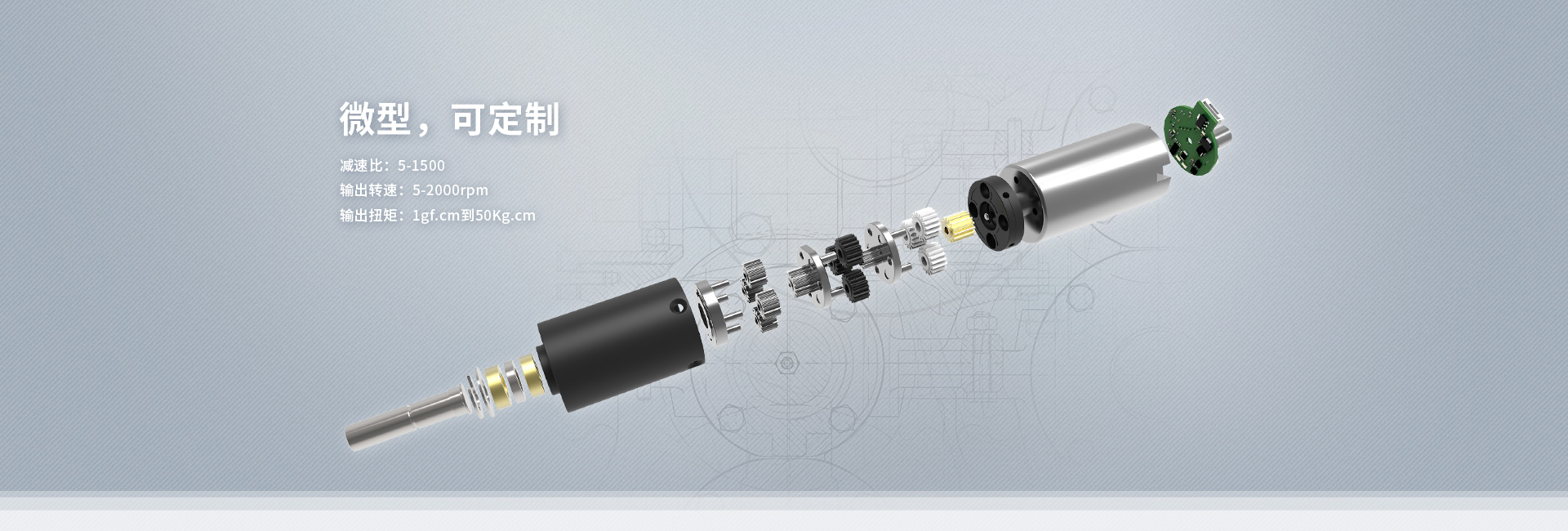
移动机器人可以广泛应用在各行各业中,移动机器人从工作环境来分,可分为室内移动机器人和室外移动机器人;按移动方式来分:轮式移动机器人、步行移动机器人、蛇形机器人、履带式移动机器人、爬行机器人等;按控制体系结构来分:功能式(水平式)结构机器人、行为式(垂直式)结构机器人和混合式机器人;移动机器人步进电机是一种应用在移动机器人传动模块上,主要传动结构由驱动电机、减速齿轮(齿轮箱)组装而成,移动机器人步进电机通常是按照定制技术参数,例如驱动步进电机的直径规格,输出转速,输出功率,额定电压等参数,减速齿轮箱的减速比,输出转速,输出扭矩,输出精度,传动噪音等技术参数是定制开发而成;兆威公司致力于研发、设计、制造机器人电机齿轮箱,可按照需求定制参数,定制参数范围在定制参数范围直径在3.4mm-38mm,电压:3V-24V,功率:0.01-40W,输出转速:5-2000rpm,减速比:5-1500,输出扭矩:1gfNaN-50KgfNaN;

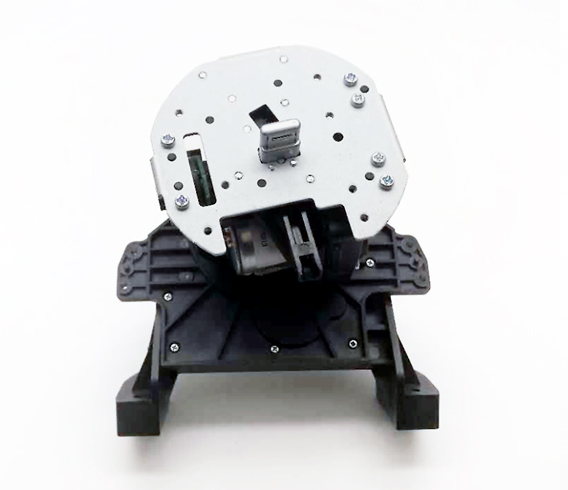
项目名称:智能机器人轮式行走齿轮箱解决方案
开发背景:智能机器人可以按预先编排的程序或人工智能技术制定的原则纲领行动,成熟智能的产品可以取代人的工作,例如生产业、建筑业,或是危险的工作。机器人按运动方式分为轮式、腿式、履带式、蛇形式和复合式等方式。其中轮式移动机器人在自主移动机器人领域占有较为重要的地位,具有运动速度快、控制简单等特点,在自动码垛生产线、无人驾驶车辆等领域应用广泛。
技术方案:机器人轮式行走驱动部分采用直流电 机和38mm行星齿轮箱组合,反对称安装方式。这种方式可以在使轮对同轴,提供较大动力(通常电机外形尺寸和功率成一定比例)的情况下,减轻减速机输出轴受力点,大大缩短轮距,节约空间,以使机器人体积小型化。

相关产品
/ RELATED


在线留言
MESSAGES